




CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN TỐC ĐỘ ĐỘNG CƠ DC
Các bạn có thể mua bộ điều tốc động cơ dc ở link bên dưới:
- Bộ điều khiển tốc độ động cơ pwm DC 12-40V 10A
- Bộ điều khiển tốc độ động cơ pwm DC 12-60V 20A
- Bộ điều khiển tốc độ động cơ pwm DC 12-40V 30A
Khái niệm bộ điều khiển động cơ DC
Bộ điều khiển động cơ DC – Động cơ 1 chiều là thiết bị hoặc 1 nhóm thiết bị đáp ứng nhu cầu điều chỉnh một cách xác định trước hiệu suất của động cơ 1 chiều.
Bộ điều khiển động cơ 1 chiều có thể gồm có phương tiện thủ công hoặc tự động để khởi động và tạm dừng động cơ, chọn quay ngược hay chuyển tiếp, chọn và điều chỉnh tăng giảm tốc độ, điều chỉnh hoặc giới hạn lực momen xoắn, bảo vệ chống quá tải và lỗi của động cơ.
Hiện nay, có 5 mạch điều khiển tốc độ động cơ một chiều được sử dụng phổ biến trên thị trường. Đó là:
– Mạch điều khiển tốc độ động cơ DC 12V dùng Mosfet đơn giản
– Mạch điều khiển tốc độ động cơ điện dùng IC555
– Mạch điều khiển tốc dộ motor DC bằng arduino
– Mạch cầu H dùng mosfet kênh N
– Mạch điều khiển tốc độ motor DC dùng module L298N
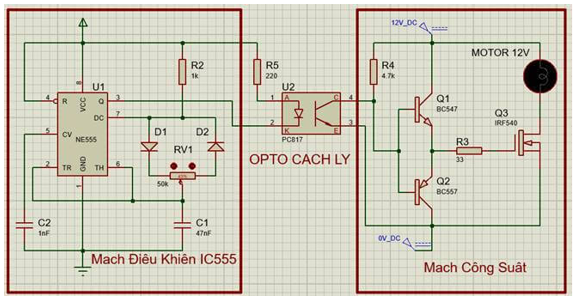
Mạch điều khiển tốc độ động cơ điện dùng IC555
IC NE555 nhận xung điện áp có dạng xung răng cưa do mạch R, C tạo ra tại chân 2, chân 6. Sau khi qua IC555 ta được độ rộng xung, có độ rộng xung có thể thay đổi được giá trị trung bình của điện áp. Tần số xung điện phụ thuộc vào giá trị R, C.
IC555 tạo ra xung có thể điều khiển tốc độ của động cơ bằng phương pháp điều khiển đầu ra PWM.
+ Ưu điểm: Khi dùng IC5555 thì không cần phải lập trình, mạch giá rẻ nhưng dùng được công suất lớn. Dãy điều khiển tốc độ nhanh chậm và đạt hiệu quả cao. Điều khiển được động cơ dùng điện áp cao.
+ Nhược điểm: Mạch điều khiển khá phức tạp, không thể điều khiển chiều động cơ.
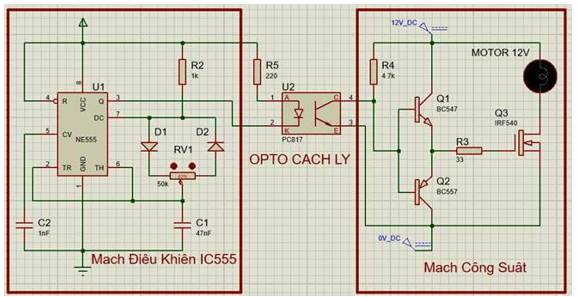
Mạch điều khiển tốc độ động cơ điện dùng IC555
Mạch điều khiển tốc độ motor DC bằng Arduino
Tương tự với IC555, chỉ khác ở mạch điều khiển dùng vi điều khiển Arduino thay vì IC555. Arduino có khả năng tạo xung PWM có tần số 490Hz và 980Hz
+ Ưu điểm: Mạch điều khiển đơn giản, có công suất và hiệu suất cao. Được lập trình nên dễ dàng thay đổi bằng phần mềm. Và có thể mở rộng thêm các ứng dụng khác chạy song song với Arduino.
+ Nhược điểm: Arduino UNO có giá cao hơn so với IC555. Cần lập trình cho Arduino đọc hiểu giá trị biến trở và tạo ra xung PWM. Không thể đảo chiều động cơ.
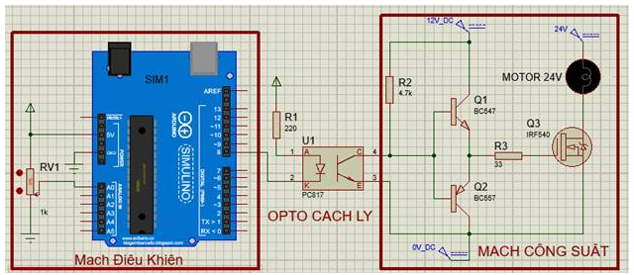
Mạch điều khiển tốc độ motor DC bằng Arduino
Mạch điều khiển tốc độ motor DC 12V dùng Mosfet
Mạch điện điều khiển động cơ DC bằng Mosfet: Điều chỉnh tốc độ bằng biến trở.
Tại đây, điều chỉnh điện áp ở cực G để điều khiển Mosfet. Điện áp phân áp tăng thì điện áp trên Mosfet giảm, tốc độ động cơ nhanh hơn và ngược lại, điện áp phân áp giảm thì điện áp trên Mosfer tăng, tốc độ động cơ điện chậm lại.
Đơn giản chỉ với vài linh kiện mạch điện có thể thay đổi điện áp động cơ DC 12V công suất nhỏ. Điểm hạn chế của mạch này là công suất nhỏ do điện áp rơi trên Mosfet lớn, nếu động cơ lớn sẽ làm nóng hư Mosfet.
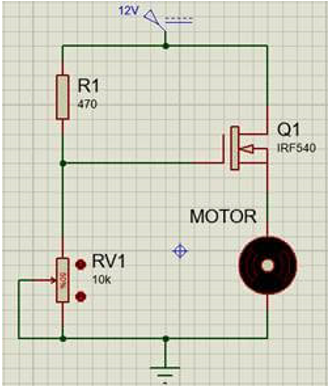
Mạch điều khiển tốc độ motor DC 12V dùng Mosfet
Mạch cầu H dùng Mosfet kênh N
Chức năng: điều khiển chiều và tốc độ động cơ một chiều.
+ Phần điều khiển có thể dùng bảng điều khiển hoặc IC555 phát xung PWM. Tốc độ động cơ tăng khi thay đổi độ rộng xung từ 50% về 0 hoặc 100%. Khi đảo chiều động cơ thì độ rộng xung thay đổi qua cột mốc 50%.
+ Phần mạch lái dùng IC IR2103 để đảm bảo khi dẫn các Mosfet dẫn bảo hòa, tăng hiệu suất cho mạch.
+ Mạch công suất dùng Mosfet công suất lớn để phù hợp cho động cơ lớn khi hoạt động.
+ Ưu điểm mạch điều khiển và động lực được hoạt động riêng biệt nên điện áp phần điều khiển không phụ thuộc phần mạch công suất. Do đó điều khiển được động cơ công suất lớn, điện áp lên đến 220V. Điều khiển đảo chiều động cơ qua biến trở.
+ Nhược điểm: Mạch điện phức tạp, cần am hiểu kiến thức cơ bản về điện tử để làm mạch này.
Mạch cầu H dùng Mosfet kênh N
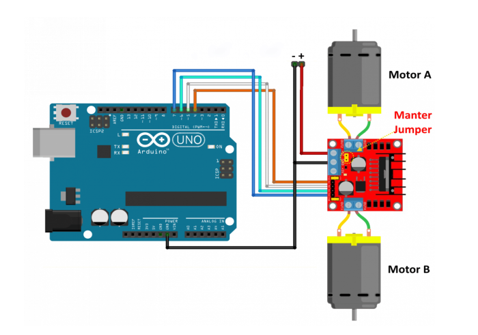
Mạch điều khiển tốc độ motor dc 220V với chip L298N
L298N chính là trình điều khiển của động cơ H-Bridge kép, chúng sẽ cho phép điều khiển tốc độ và hướng của 2 động cơ DC cùng 1 lúc. Nó có thể điều khiển được động cơ DC có điện áp nằm trong khoảng từ 5 – 35V, với dòng điện cực đại có thể lên đến 2A.
Xem xét kỹ lưỡng hơn về phần sơ đồ chân của chip L298N, chúng ta có thể giải thích nguyên lý hoạt động của nó. Chip L298N gồm có 2 nhóm chân cho động cơ là A và B. Và 1 chân ở giữa với chức năng điều chỉnh cho chân Ground, sử dụng VCC cho động cơ và phần chân 5V được xem là đầu vào hoặc đầu ra.
Điều này còn phụ thuộc vào điện áp khi chúng ta sử dụng tại động cơ VCC. Mô đun này cũng có bộ điều chỉnh 5V ở trên board được bật/ tắt bằng hình thức sử dụng dây nối. Nếu điện áp cung cấp vào động cơ lên đến 12V thì chúng ta có thể kích hoạt được bộ điều chỉnh 5V và lúc này nó có thể được dùng làm đầu ra, chẳng hạn để cấp nguồn cho mạch điều khiển board Arduino.
Cần lưu ý thêm ở đây rằng, con IC này có thể làm giảm điện áp xuống khoảng 2V. Vì vậy, nếu chúng ta đang sử dụng nguồn điện 12V thì điện áp tại các chân động cơ sẽ có giá trị vào khoảng 10V. Điều đó có nghĩa là người dùng sẽ không thể cung cấp được tốc độ tối đa khi khởi động động cơ DC được.
Tiếp theo là các đầu vào của bộ điều khiển với các chân bật A và bật B được sử dụng để nhằm việc bật và kiểm soát kỹ lưỡng tốc độ của động cơ. Nếu 1 dây ở trên chân này thì động cơ sẽ được kích hoạt ngay lập tức ở tốc độ tối đa.
Còn nếu loại bỏ được sợi dây, chúng ta đã có thể kết nối ngay 1 đầu vào bộ điều chỉnh PWM với chân này. Cũng theo cách đó, bạn có thể kiểm soát được tốc độ của động cơ. Nếu chúng ta kết nối phần chân này với bộ phận Ground, động cơ sẽ tự động bị vô hiệu hóa.
Mạch điều khiển tốc độ motor dc 220V với chip L298N
BÀI VIẾT CÙNG CHỦ ĐỀ












